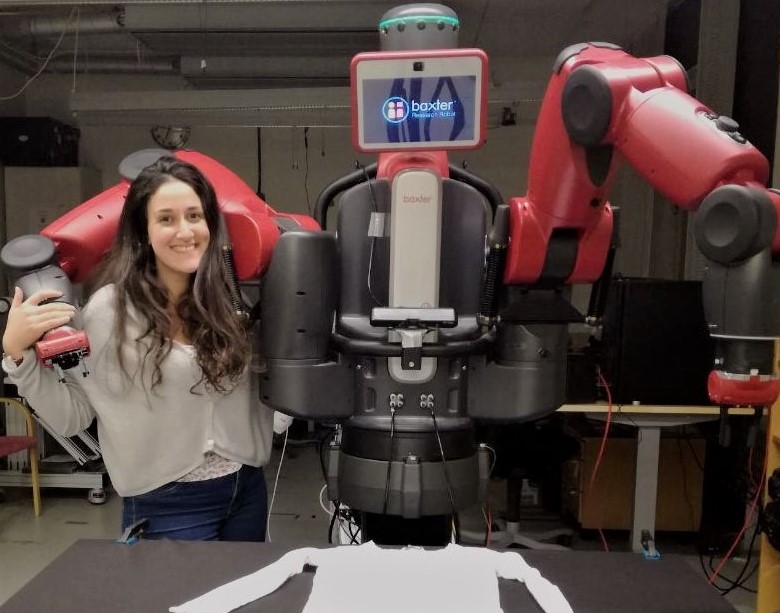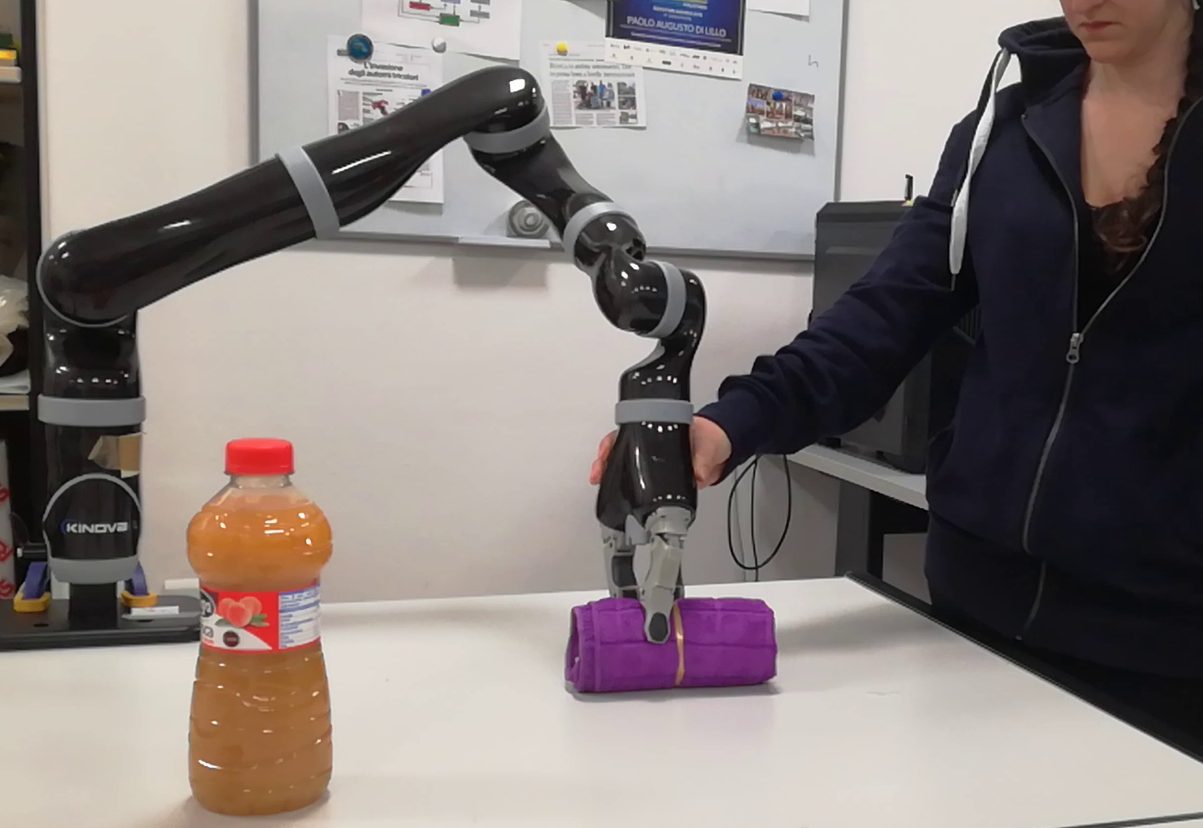
Human-robot interaction
The objective is to devise control strategies which allow a robotic system, composed of one or more manipulators, to interact with a human operator. The interaction may consist in sharing the same workspace or explicitly exchange forces.

Distributed control
The objective is to coordinate a system composed of multiple manipulators, which may be tightly connected, in the absence of a central control unit. Fault detection and isolation strategies need to be included as well for system's robustness.
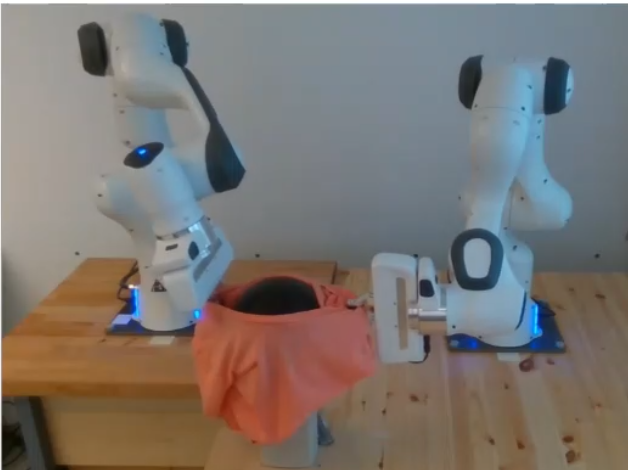
Deformable and rigid object manipulation
The objective is to define the actions to undertake in order to manipulate rigid or deformable objects, which are characterized by high-dimensional state spaces, and achieve desired goal configurations.